# GPIO
The GPIO (General Purpose Input Output) allows you to turn on LEDs, react to button presses, or do just about anything.
Our BrainBox has 4 GPIO pins that you can control. Before you do anything with a pin, you must first set its mode.
There are 4 modes:
| Mode | Python | Description |
|---|---|---|
| Digital Output | robot.OUTPUT | Allows you to write a high or low signal |
| Digital Input | robot.INPUT | Allows you to read a high or low signal |
| Analog Input | robot.INPUT_ANALOG | Allows you to read a voltage, like a voltmeter |
| Pullup Input | robot.INPUT_PULLUP | Like analog, but uses a weak pullup resistor |
| Servo Input | robot.PWM_SERVO | Allows you to use a servo. Read more about servos |
TIP
The GPIO are numbered 0-3
# Python
To write a digital signal on pin 1:
R.gpio[1].mode = robot.OUTPUT
R.gpio[1].digital = True
To read a digital signal on pin 2:
R.gpio[2].mode = robot.INPUT
print(R.gpio[2].digital)
To read an analog signal on pin 3:
R.gpio[3].mode = robot.INPUT_ANALOG
print(R.gpio[3].analog)
TIP
All modes can be used on all pins
Here's a more complete example:
import robot
R = robot.Robot()
# read digital value from GPIO 1
R.gpio[1].mode = robot.INPUT
print(R.gpio[1].digital)
# read analog value from GPIO 2
R.gpio[2].mode = robot.INPUT_ANALOG
print(R.gpio[2].analog)
# write digital value to GPIO 3
R.gpio[3].mode = robot.OUTPUT
R.gpio[3].digital = True
# all modes can be used on all GPIOs
# theres also robot.INPUT_PULLUP
# Blockly
The GPIO blocks can be found in the GPIO section.
# Pull-ups
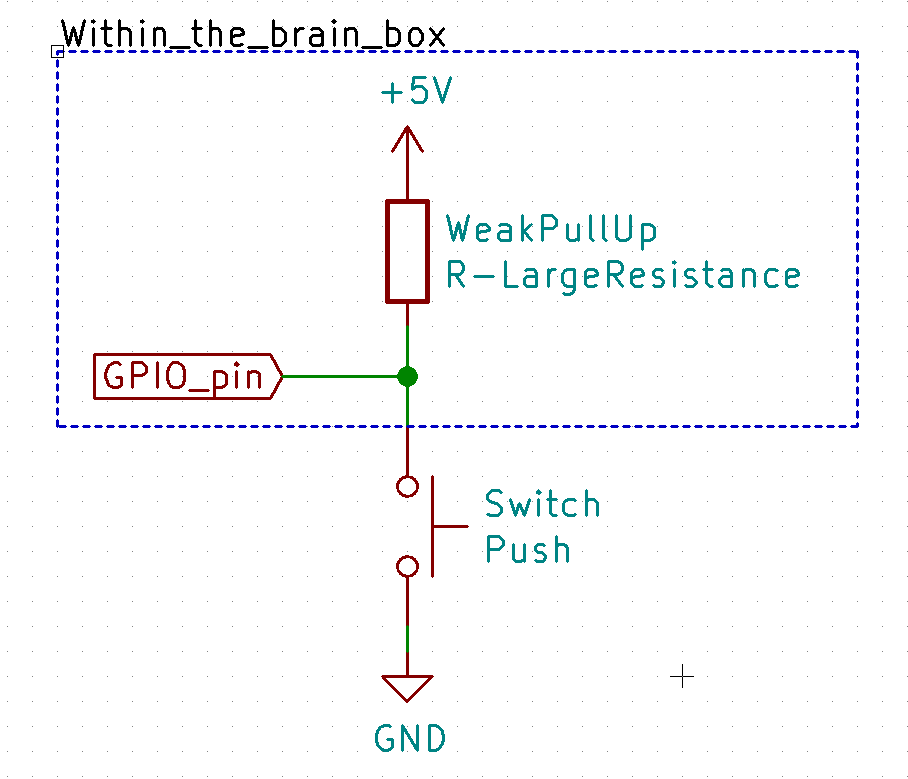
The BrainBox possesses the ability to enable a built-in pull-up resistor on any input pin. This takes a small amount of explanation.
Normally, input pins are not connected to anything - known as “floating”. In this state, they might read high or low, or different values depending on their environment (due to anything from cosmic rays to the wiring in the building). This is obviously not good for consistent control.
Many pieces of off-the-shelf electronics that have some form of standard I/O output will connect this pin to 5V (high) and 0V (low) when required, so this is not a problem. However, for simple electronics, a microswitch for example, you would normally be required to connect a resistor between the input pin and 5V (a pull-up resistor), or between the input pin and 0V (a pull-down resistor) to keep the input in a known state until the switch overrides it by connecting directly to the opposite state.
However, the built-in pull-up resistor alleviates this need. It essentially wires in a resistor connected to 5V, meaning that when this option is enabled, an input pin will “default” to being high. This means you can simply connect a switch between the input pin and a ground pin without any need of resistors - when the switch is open, the pin will read high; when closed, it will read low.
# Setting multiple pins
When you set multiple pins, you'll need to set them in order. This is due to how the brainbox internally sets pins
For example...
This won't work:
# Wrong
import robot
R = robot.Robot()
R.gpio[1].mode = robot.INPUT
R.gpio[3].mode = robot.INPUT_PULLUP
R.gpio[2].mode = robot.OUTPUT
# Pin 3 is set before pin 2, which won't work
But this will:
# Right
import robot
R = robot.Robot()
R.gpio[1].mode = robot.INPUT
R.gpio[2].mode = robot.OUTPUT
R.gpio[3].mode = robot.INPUT_PULLUP
# As all the GPIO pins are set in order, this is fine